Understand the context of the problem: The equilibrium orientation of a loop typically refers to the position where the net torque acting on the loop is zero. This often involves analyzing the interaction between the magnetic field and the current-carrying loop.
Identify the forces and torques acting on the loop: A current-carrying loop in a magnetic field experiences a torque due to the interaction between the magnetic moment of the loop and the magnetic field. The torque is given by the vector equation: , where is the magnetic moment of the loop and is the magnetic field.
Determine the magnetic moment of the loop: The magnetic moment is calculated as , where is the current in the loop and is the area vector of the loop. The direction of is determined by the right-hand rule.
Set the condition for equilibrium: For the loop to be in equilibrium, the torque must be zero. This happens when the magnetic moment is aligned with the magnetic field . Mathematically, this means the angle between and is zero (parallel) or 180 degrees (antiparallel).
Conclude the equilibrium orientation: The loop's equilibrium orientation is when its plane is perpendicular to the magnetic field, and the magnetic moment vector is either aligned (parallel) or anti-aligned (antiparallel) with the magnetic field direction.
Verified video answer for a similar problem:
This video solution was recommended by our tutors as helpful for the problem above
Video duration:
4m
Play a video:
0 Comments
Key Concepts
Here are the essential concepts you must grasp in order to answer the question correctly.
Equilibrium
Equilibrium in physics refers to a state where all forces and torques acting on an object are balanced, resulting in no net force or rotation. In the context of a loop, this means that the gravitational force, tension, and any other forces are in balance, allowing the loop to maintain a stable position without accelerating or rotating.
Torque is a measure of the rotational force applied to an object, which causes it to rotate around an axis. The equilibrium orientation of a loop is influenced by the torques generated by various forces acting on it, such as gravity and tension. For the loop to be in equilibrium, the sum of the torques must equal zero.
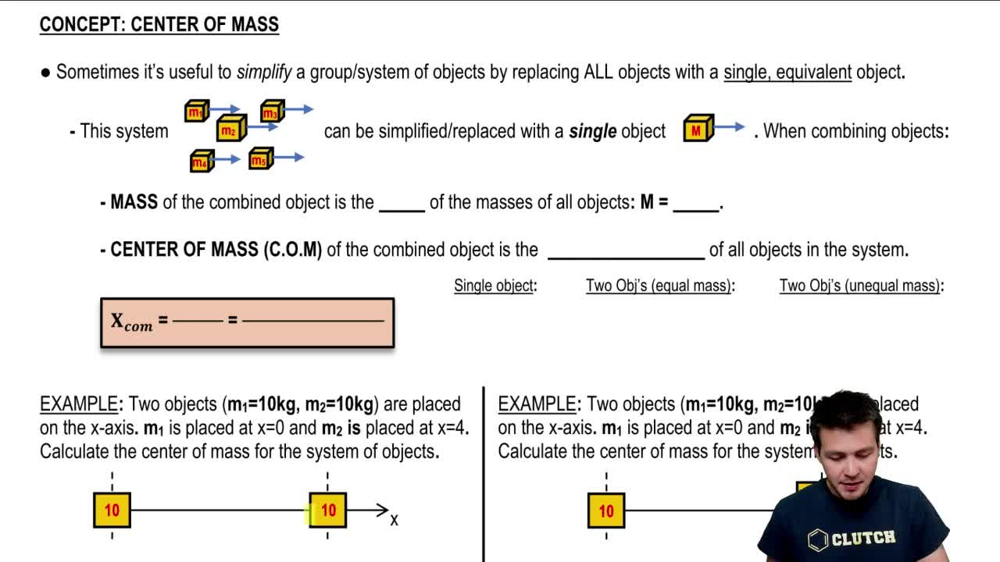
The center of mass is the point in an object where its mass is evenly distributed in all directions. For a loop, the center of mass plays a crucial role in determining its equilibrium orientation, as the loop will tend to orient itself such that the center of mass is at the lowest possible point, minimizing potential energy and achieving stability.

 Verified step by step guidance
Verified step by step guidance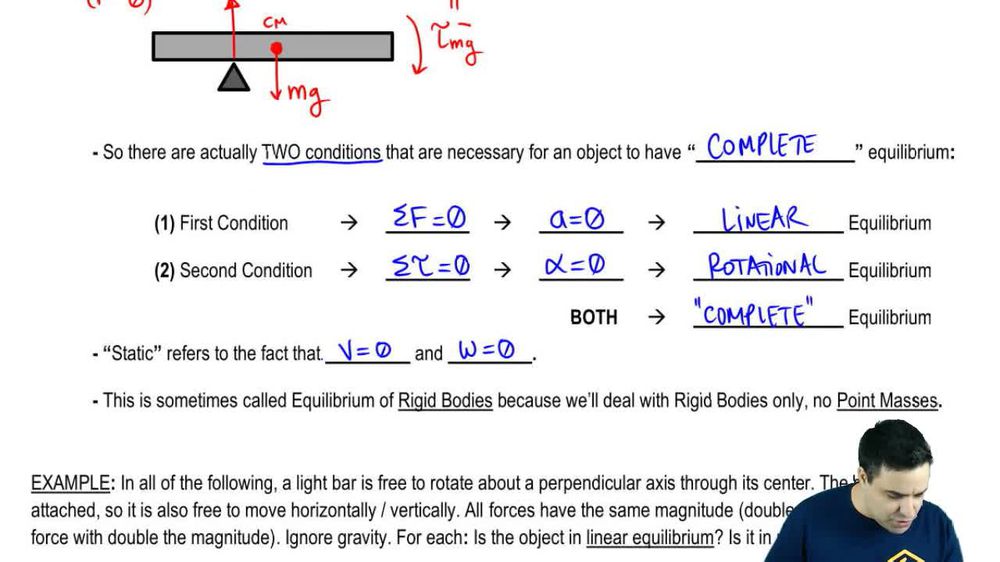
 10:13
10:13