 Back
BackDynamics of Rotational Motion: Torque, Angular Momentum, and Statics
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Dynamics of Rotational Motion
Torque
Torque is the rotational equivalent of force and is responsible for causing angular acceleration in a rigid body. It depends on both the magnitude of the force applied and the distance from the axis of rotation at which the force acts.
Definition: Torque (\( \tau \)) is defined as the product of the force (\( F \)) and the moment arm (\( r_\perp \)), which is the perpendicular distance from the axis of rotation to the line of action of the force.
Formula: where \( \phi \) is the angle between the position vector \( \vec{r} \) and the force \( \vec{F} \).
Units: Newton-meter (N·m)
Sign Convention: Positive torque causes counterclockwise rotation, while negative torque causes clockwise rotation.
Moment Arm: The moment arm (\( l \)) is the shortest distance from the axis of rotation to the line of action of the force.


Examples of Torque
Multiple Forces on a Wheel: When several forces act on a wheel at different angles, the net torque is the sum of the individual torques, considering their directions and points of application.

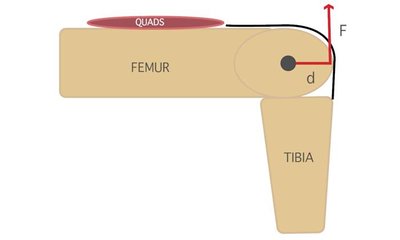
Biomechanics Application: The kneecap (patella) acts as a lever arm to increase the torque produced by the quadriceps muscle, allowing efficient extension of the leg.

Newton’s Second Law for Rotation
Newton’s second law for rotation is analogous to its linear counterpart, relating net torque to angular acceleration.
Formula: where \( I \) is the moment of inertia and \( \alpha \) is the angular acceleration.
Moment of Inertia: The rotational equivalent of mass, representing an object's resistance to angular acceleration.

Example Problem: A cord wrapped around a wheel with a known force and radius can be used to compute angular acceleration using the above law.


Rotational Work and Power
Work and power in rotational motion are analogous to their linear forms, but use torque and angular displacement or velocity.
Rotational Work: where \( \Delta \theta \) is the angular displacement in radians.
Rotational Power: where \( \omega \) is the angular velocity.
Application: Engine performance is often described in terms of torque and power as functions of rotational speed (RPM).

Angular Momentum
Angular momentum is a measure of the rotational motion of an object and is conserved in the absence of external torques.
Definition: For a rigid body, angular momentum (\( L \)) is given by: For a particle: , where \( l \) is the lever arm.
Newton’s Second Law for Rotation:
Conservation of Angular Momentum
In the absence of a net external torque, the total angular momentum of a system remains constant.
Principle:
For a Rigid Body:
Example: Figure skaters spin faster when they pull their arms in, reducing their moment of inertia and increasing angular velocity to conserve angular momentum.

Statics
Statics is the study of objects in equilibrium, where both the net force and net torque on the object are zero.
Conditions for Equilibrium:
Choosing the Axis: Select an axis of rotation that simplifies calculations, often where unknown forces produce zero torque.

Example Problem: Calculating the tension in a cable and the forces on a hinge for a supported beam.
Summary Table: Rotational Dynamics Quantities
Quantity | Linear Form | Rotational Form |
|---|---|---|
Displacement | \( s \) | \( \theta \) |
Velocity | \( v \) | \( \omega \) |
Acceleration | \( a \) | \( \alpha \) |
Mass / Inertia | \( m \) | \( I \) |
Force / Torque | \( F \) | \( \tau \) |
Momentum | \( p = m v \) | \( L = I \omega \) |
