 Back
BackStatics and Torque: Principles and Applications
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Statics and Torque
Introduction to Torque
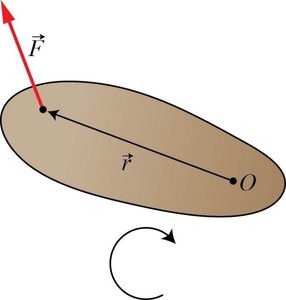
Torque is a measure of the tendency of a force to rotate an object about a specific axis or point. It plays a central role in the study of statics, which deals with objects in equilibrium. Understanding torque is essential for analyzing the balance and stability of structures and mechanical systems.
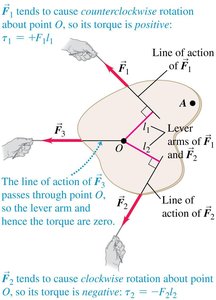
Line of Action: The line along which the force vector acts.
Lever Arm: The perpendicular distance from the axis of rotation (point O) to the line of action of the force.
Torque (τ): The product of the force and its lever arm.
Mathematical Expression of Torque
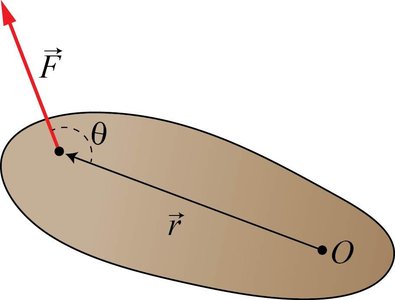
The magnitude of the torque produced by a force F applied at a distance r from the axis of rotation and at an angle θ is given by:
r: Distance from the axis of rotation to the point where the force is applied.
F: Magnitude of the applied force.
θ: Angle between the position vector and the force vector.
Vector Nature of Torque
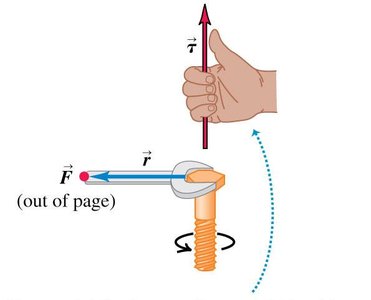
Torque is a vector quantity and can be expressed using the vector (cross) product:
The direction of the torque vector is determined by the right-hand rule.
If you curl the fingers of your right hand in the direction of rotation caused by the force, your thumb points in the direction of the torque vector.
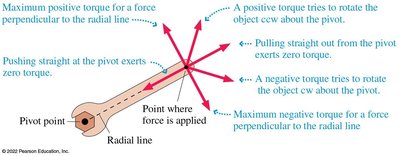
Torque in Two Dimensions
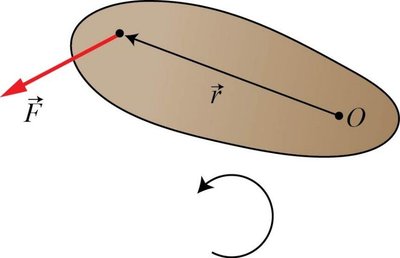
In two-dimensional problems, the sign of the torque indicates the direction of rotation:
Counterclockwise torque: Positive sign.
Clockwise torque: Negative sign.
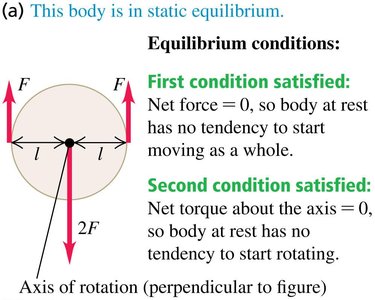
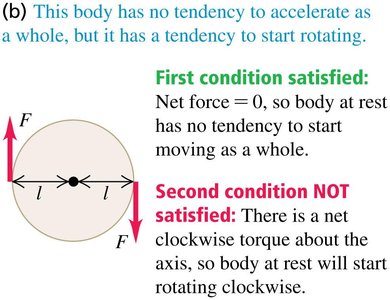
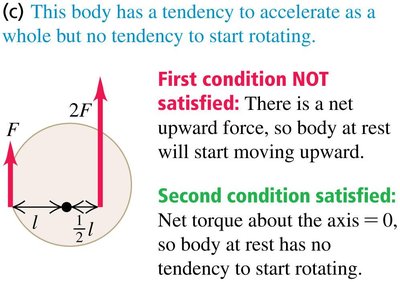
Conditions for Equilibrium
For an extended body to be in static equilibrium, two conditions must be satisfied:
First Condition (Translational Equilibrium): The vector sum of all external forces must be zero:
Second Condition (Rotational Equilibrium): The sum of all external torques about any point must be zero:
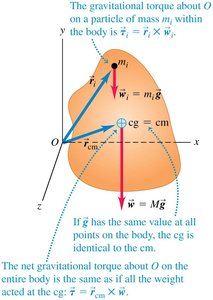
Center of Gravity
The center of gravity (CG) is the point at which the entire weight of a body can be considered to act for the purposes of analyzing gravitational torque and equilibrium.
For a system of particles, the position of the center of gravity is:
If gravitational acceleration is uniform, this simplifies to the center of mass.
For homogeneous, symmetrical objects, the CG is at the geometric center.
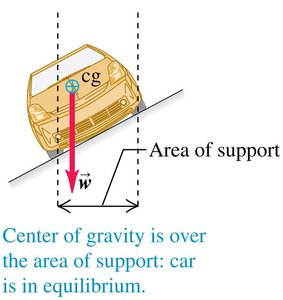
Equilibrium and Area of Support
For an object supported at several points, its center of gravity must lie within the area bounded by the supports to maintain equilibrium.
Example Problems in Statics and Torque
Example 1: Loosening a Pipe Fitting
A 900-N force is applied at 0.80 m from the center of a pipe fitting at an angle of 19° with the horizontal. The torque about the center is:
The direction is counterclockwise.
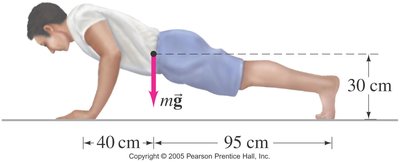
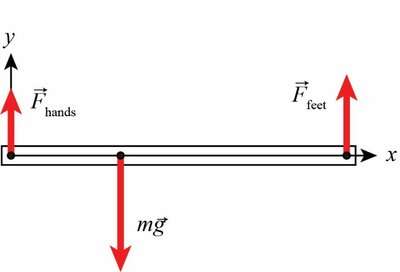
Example 2: Push-Ups and Normal Forces
To analyze the forces on the hands and feet during a push-up, consider the body as a rigid bar in equilibrium. The sum of forces and torques allows calculation of the normal forces at the hands and feet.
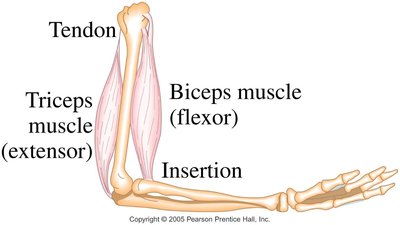
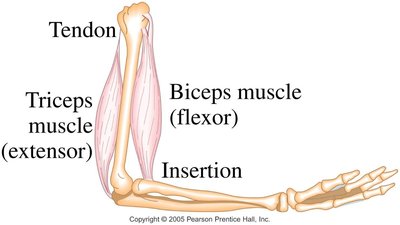
Biomechanics: Musculoskeletal System
Muscles are attached to bones via tendons at points called insertions. Joints allow bones to pivot, and muscles contract to produce force. Flexors (e.g., biceps) bring limbs together, while extensors (e.g., triceps) extend them outward.
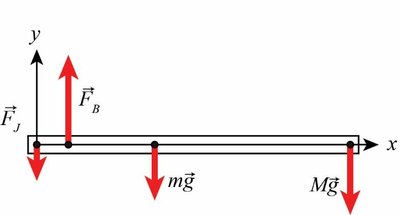
Example 3: Biceps Muscle Force
To hold a load with the forearm, the biceps must exert a force much greater than the weight of the load due to the short lever arm of the muscle attachment. The torque about the elbow joint is set to zero for equilibrium, and the force is solved accordingly.
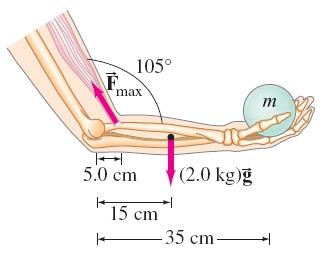
Example 4: Maximum Biceps Force
Given the mass of the forearm and hand, and the attachment point of the biceps, the maximum force the muscle can exert is found by setting the sum of torques about the elbow to zero.
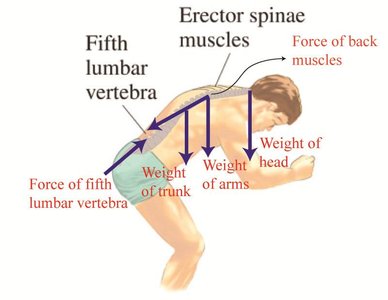
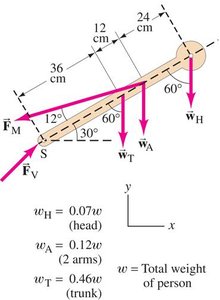
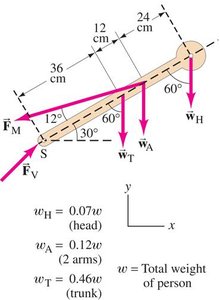
Example 5: Forces on the Lumbar Vertebra
When lifting or bending, the forces on the lumbar vertebrae can be analyzed by summing torques about the base of the spine. The force required by the back muscles is often much greater than the weight being lifted.
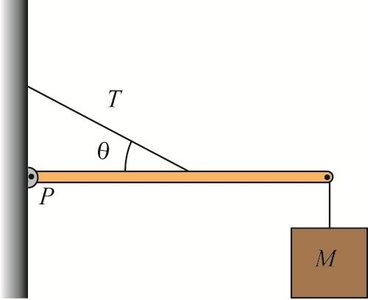
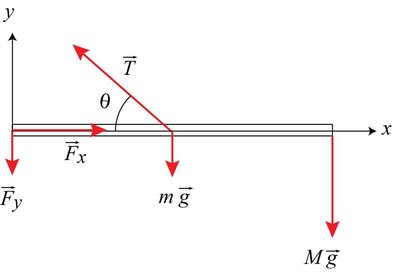
Example 6: Beam Supported by a Wire and Hinge
A uniform beam supports a mass at its end and is held by a wire at an angle. The tension in the wire and the force at the hinge are found by applying equilibrium conditions for forces and torques.
Summary Table: Key Concepts in Statics and Torque
Concept | Definition/Formula | Notes |
|---|---|---|
Torque (τ) | Vector product: | |
Equilibrium (Translational) | No net force; no linear acceleration | |
Equilibrium (Rotational) | No net torque; no angular acceleration | |
Center of Gravity | For uniform gravity |
