 Back
BackTorque, Rotational Dynamics, and Static Equilibrium
Study Guide - Smart Notes
 Tailored notes based on your materials, expanded with key definitions, examples, and context.
Tailored notes based on your materials, expanded with key definitions, examples, and context.
Torque and Rotational Dynamics
Introduction to Torque
Torque is a measure of the tendency of a force to rotate an object about an axis, fulcrum, or pivot. It is the rotational equivalent of force in linear motion and plays a central role in rotational dynamics.
Definition: Torque (\( \tau \)) is defined as the product of the force and the perpendicular distance from the axis of rotation to the line of action of the force.
Formula: where r is the distance from the pivot, F is the force, and \theta is the angle between r and F.
SI Unit: Newton-meter (N·m)
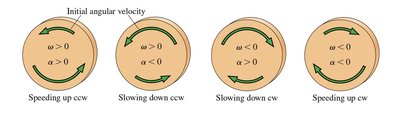
Direction: Counterclockwise (CCW) torques are positive, clockwise (CW) torques are negative.
Translational vs. Rotational Motion
Physical systems can undergo both translational (linear) and rotational motion. The equations of motion for each are analogous, with force corresponding to torque and mass to moment of inertia.
Translational Motion: Described by displacement, velocity, and acceleration.
Rotational Motion: Described by angular displacement, angular velocity, and angular acceleration.
Translational | Rotational |
|---|---|
Displacement: | Angular Displacement: |
Velocity: | Angular Velocity: |
Acceleration: | Angular Acceleration: |

Newton's Second Law for Rotation
Newton's Second Law for rotation relates the net torque acting on a rigid body to its angular acceleration and moment of inertia.
Equation: where I is the moment of inertia and \alpha is the angular acceleration.
Moment of Inertia: The rotational analog of mass, representing an object's resistance to angular acceleration.
Calculating Torque
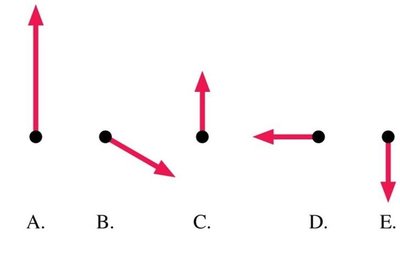
Torque can be calculated using the cross product of the position vector and the force vector. Only the component of force perpendicular to the lever arm contributes to torque.
General Formula:
Magnitude:
Special Cases: If the force is applied directly along the line from the pivot, and .

Examples of Torque
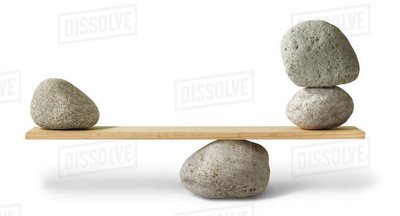
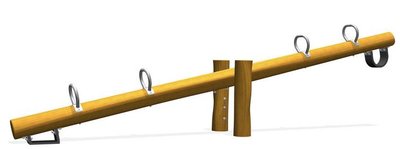
Seesaw and Balancing: A seesaw is balanced when the torques produced by the weights on either side are equal and opposite.
Atwood Machine: A system with two masses connected over a pulley, used to study linear and rotational dynamics.
Static Equilibrium
Conditions for Equilibrium
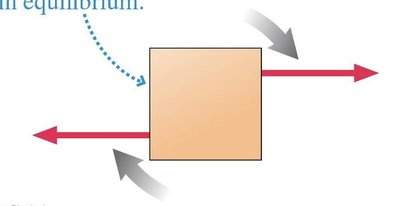
An object is in static equilibrium if it is at rest and remains at rest, meaning both its linear and angular accelerations are zero. This requires that both the net force and the net torque on the object are zero.
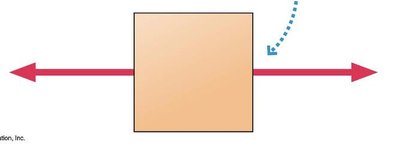
First Condition (Translational):
Second Condition (Rotational):
Examples of Static Equilibrium
Balanced Objects: Objects such as seesaws, bridges, or beams are in static equilibrium when the sum of all forces and torques acting on them is zero.
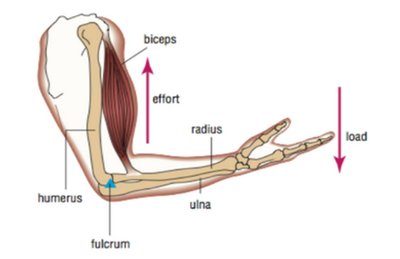
Human Arm Holding a Weight: The biceps muscle provides an upward force to balance the downward force of a weight, with the elbow acting as the pivot.
Practice Problems and Applications
Finding Forces: Calculate the force required by muscles or supports to maintain equilibrium.
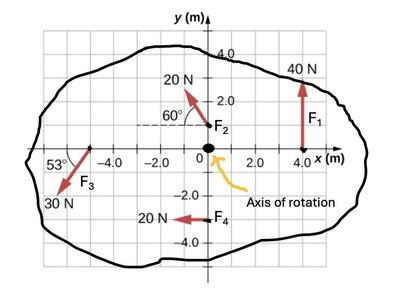
Determining Net Torque: Analyze systems with multiple forces to determine the net torque and predict rotational motion.
Summary Table: Key Quantities in Rotational Dynamics
Quantity | Symbol | SI Unit | Equation |
|---|---|---|---|
Torque | N·m | ||
Moment of Inertia | kg·m2 | ||
Angular Acceleration | rad/s2 | ||
Angular Velocity | rad/s |
Additional info:
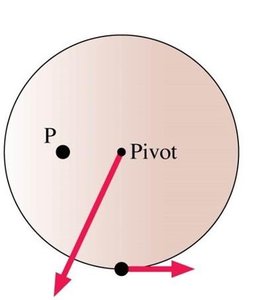
When analyzing equilibrium, always choose a convenient axis of rotation to simplify torque calculations.
Forces applied at the pivot point produce zero torque.
In biological systems, muscles often exert much larger forces than the weights they support due to short lever arms.
